Intelligente Netzintegration gemeinschaftlich genutzter Elektrofahrzeuge
Die intelligente Integration zukünftiger Flotten gemeinschaftlich genutzter Fahrzeuge in das Stromnetz bietet vielfältige Möglichkeiten für eine Optimierung der Ladevorgänge. So kann durch eine Betriebsführung mit Rücksicht auf das Netz auch in Spitzenlastzeiten eine möglichst hohe Ladeleistung gewährleistet werden. Weiterhin ermöglicht die Vernetzung der Ladeinfrastruktur mit übergeordneten, web-basierten Diensten neue Geschäftsmodelle für das Laden von Elektrofahrzeugen.
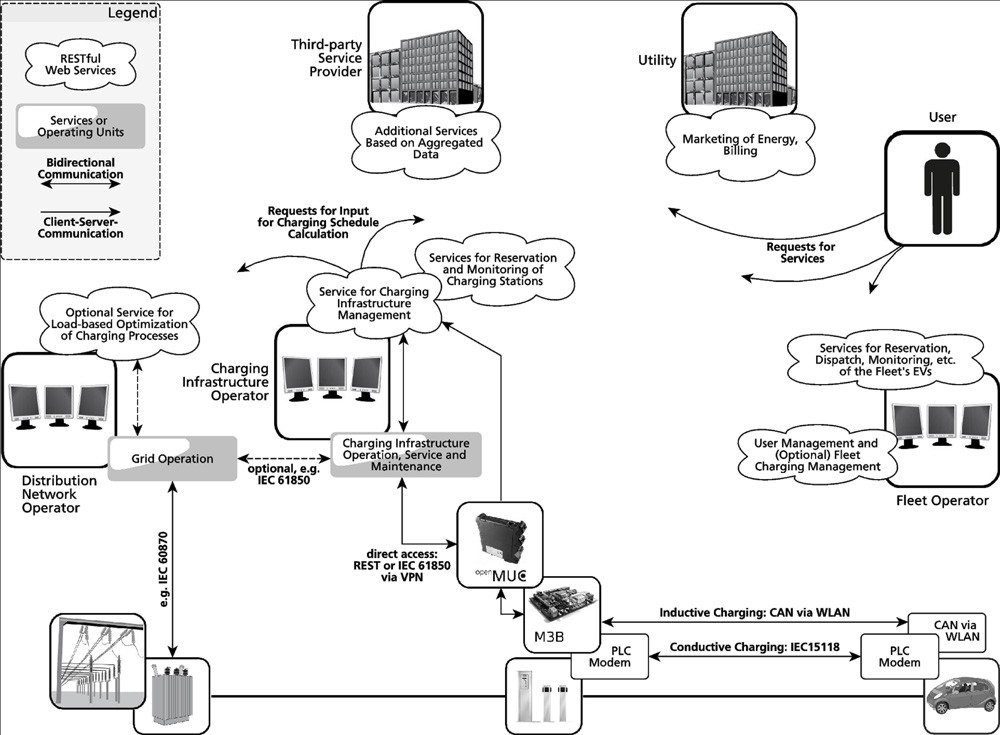
Das zentrale Element zukünftiger Märkte rund um die gemeinschaftliche E-Mobilität sind die Daten, welche über die Mobilitätsdatencloud gesammelt, geteilt und verarbeitet werden. Um eine nahtlose Integration der Ladeinfrastruktur in diese Architektur zu erreichen, folgt der Systementwurf der Steuersysteme der Ladeinfrastruktur, ebenso wie der der Cloudarchitektur, den Prinzipien des Representational State Transfer (REST) Architekturstils für verteilte Systeme. Im Zentrum stehen somit die Daten und Ressourcen, welche für den intelligenten Betrieb der Ladevorgänge notwendig sind.
Zentraler Akteur des im Übermorgen- Projekt »Gemeinschaftlich-e-Mobilität: Fahrzeuge, Daten und Infrastruktur« entwickelten Systems ist der Ladeinfrastrukturbetreiber. Über ein gesichertes Netzwerk kann er direkt auf einzelne Ladestationen seiner Ladeinfrastruktur zugreifen. Dieser Direktzugriff ermöglicht ein optimales Monitoring und die Wartung der Systeme, so dass die Verfügbarkeit der Infrastruktur gewährleistet wird. Darüber hinaus kann die Infrastruktur für Vorgaben des Netzbetreibers geöffnet werden. Der Ladeinfrastrukturbetreiber implementiert weiterhin einen Clouddienst, über den die Ladestationen in entstehende Smart Markets integriert werden können. Über diese Integration können intelligente Lademanagementlösungen realisiert und stetig verbessert werden, ohne dass die Software oder Konfiguration der Feldsysteme angepasst werden muss.
Die Applikationssoftware des zentralen Steuergeräts der Ladeinfrastruktur ist als dediziertes Bundle in dem OSGi-basierten OpenMUC-Softwareframework des Fraunhofer ISE implementiert. Durch die Verwendung von OpenMUC steht eine breite Palette von Kommunikationsschnittstellen zur Verfügung:
- REST- und IEC 61850-Server sowie REST-Client zur Kommunikation mit übergeordneten Diensten und Systemen
- DLMS/COSEM und M-Bus (drahtgebunden) zur Zähleranbindung
- USB zum M3B Peripheriecontroller
Die Daten und Informationen der lokalen Ablaufsteuerung können einfach über den REST-Server des OpenMUC-Frameworks durch den Ladeinfrastrukturbetreiber abgerufen, analysiert und aktualisiert werden. In der Ladestation stellt der untergeordnete M3B Peripheriecontroller des Fraunhofer ISE die CAN-Schnittstelle zur Leistungselektronik sowie zum Fahrzeug, GPIOs sowie potentialfreie Relais zum Schalten des Ladeschützes zur Verfügung. Weiterhin implementiert er das kabelgebundene Laden entsprechend IEC 61851-3.
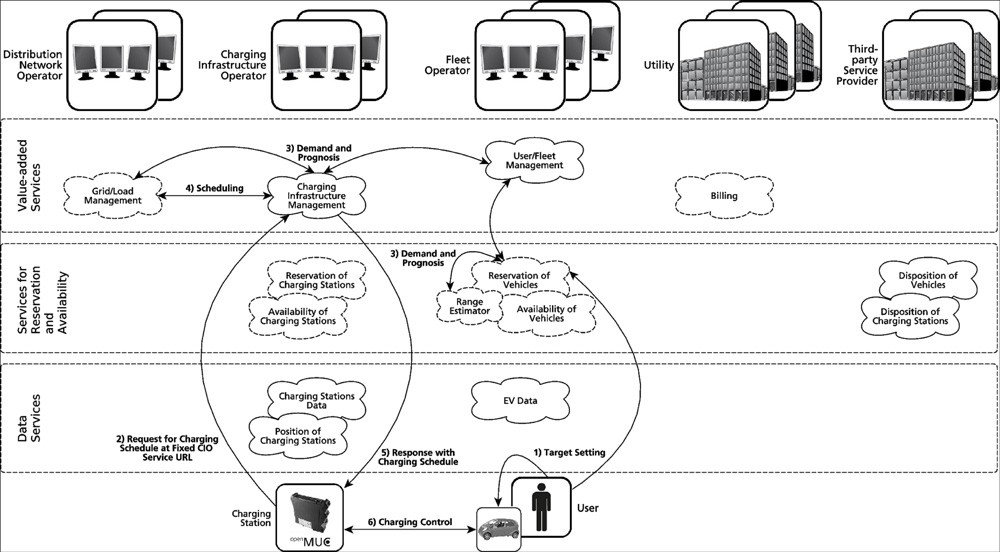
Die Steuerung der Ladevorgänge ergibt sich nun aus einem flexiblen Zusammenspiel der Clouddienste der jeweils beteiligten Stakeholder. Hierbei können verschiedene Geschäftsmodelle abgebildet werden, je nachdem welche Dienste für die betreffenden Ladestationen oder Kunden im zentralen Ladeinfrastrukturmanagementdienst registriert sind. Die einzelnen Phasen der Steuerung der Ladevorgänge orientieren sich an der ISO 15118-1.
Target Setting (1)
Sammeln der Bedarfsinformationen der authentifizierten Nutzer über das Kundeninterface im Fahrzeug, über direkte Kommunikation zwischen Fahrzeug und Ladestation oder über Clouddienste wie z.B. Fahrzeugreservierungsdienste.
Demand and Prognosis (2-3)
Sammeln von Informationen zu Stromtarifen, Netzzustand und Fahrzeugverfügbarkeit durch das Zusammenspiel des zentralen Ladeinfrastrukturmanagementdienstes mit registrierten Diensten anderer beteiligter Stakeholder.
Scheduling (4-5)
Erstellen des Ladefahrplans basierend auf den gesammelten Informationen, entweder durch den Ladeinfrastrukturbetreiber oder durch einen registrierten Dienst eines weiteren Stakeholders. Der resultierende Ladefahrplan wird als Antwort auf die Anfrage der Ladestation wieder zurück kommuniziert.
Charging Control (6)
Die Steuergeräte der Ladestation führen die lokale Ablaufsteuerung zur Umsetzung des Ladefahrplans selbstständig durch.