Ortungsdienst für Elektro-Fahrzeuge und Mobilgeräte
Nahtlose Ortung ist ein integraler Bestandteil eines Systems zur gemeinschaftliche Nutzung von Elektro-Fahrzeugen. Wenn ein Benutzer ein Fahrzeug anfordert, muss sowohl seine Position als auch die aller verfügbaren Fahrzeuge bekannt sein unabhängig davon, wo sich Benutzer und Fahrzeuge zu diesem Zeitpunkt befinden. Nur mit dieser Information kann z.B. das Fahrzeug gewählt werden, das am schnellsten vom Benutzer zu erreichen ist und die Navigation zum als auch im Fahrzeug unterstützt werden.
Im Projekt GeMo entwickelt das Fraunhofer IIS die Ortungsdienste, die sowohl in die App des Mobilgeräts als auch in das Fahrzeug integriert sind. Hierzu werden verschiedene Lokalisierungstechnologien miteinander kombiniert, um eine möglichst genaue und zuverlässige Positionierung zu gewährleisten. Satelliten-basierte Navigation ist allein nicht ausreichend, um die Anforderungen der durchgängigen Lokalisierung zu erfüllen. Vor allem in innerstädtischen Gebieten, in denen Abschattungseffekte und Reflexionen von Gebäuden, Bäumen usw. zu einem eingeschränkten oder fehlerbehafteten Empfang von Satellitensignalen führen können, ergänzen WLAN-Signale die Positionslösung sinnvoll und können eventuelle (Empfangs-)Lücken kompensieren.
Fraunhofer IIS hat bereits mit awiloc ein System entwickelt, das durch Messung der empfangenen Feldstärke von WLAN-Signalen eine Positionsbestimmung vornehmen kann. Hierzu werden die Feldstärken aller empfangenen Access Points mit Feldstärkemustern aus einer Datenbank verglichen, welche in einer Mess-Phase aufgezeichnet wurden und mit Positionsangaben versehen sind. Aufgrund der hohen Dichte an WLAN-Routern im städtischen Raum kann diese Methode die Lücken füllen, wo GPS nicht mehr zuverlässig arbeitet.
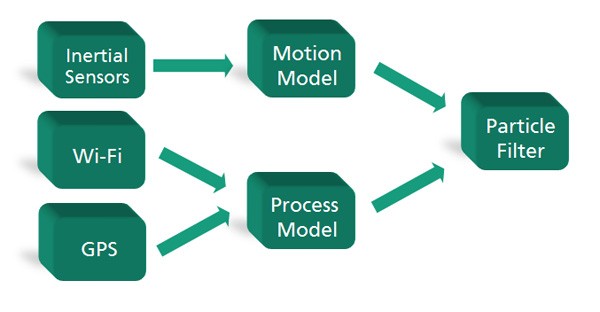
Eine Kombination von GNSS und WLAN-Lokalisierung erhöht die Positionsgenauigkeit in den Bereichen, wo beide Technologien gleichzeitig verfügbar sind. Die Fusions-Strategie ist in diesem Fall von entscheidender Bedeutung für die Qualität der Positionsbestimmung. Hier kommen Algorithmen zum Einsatz, welche statistische Bewegungs- und Mess-Modelle benutzen, um daraus die wahrscheinlichste Position zu schätzen.